近日,浙江大学的高超教授团队提出了一种手性控制规则,成功将生物材料的手性控制理念赋予到高灵敏度溶剂驱动系统的制备中。他们从已经工业化的纺纱技术得到灵感,以柔性氧化石墨烯薄膜为原料,将其加捻成具有螺旋状织构的氧化石墨烯纤维,赋予其对称的手性结构、高柔韧性和大量的应力势能。这种手性的氧化石墨烯纤维在极性溶剂的刺激下释放出应力势能,从而发生高速的转动。其输出的转速、扭矩以转动能等指标均超过了之前报道的同类驱动器。团队以这种纤维为单元,将不同手性的单元按照特定的顺序进行组合,接连开发出高灵敏度的动能输出系统、电能输出系统和重力势能收集系统。更重要的是,这种手性控制设计理念还能扩展到多种维度的纳米粒子和高分子材料中,具有良好的普适性。该工作以“Handedness-Controlled and Solvent-Driven Actuators with Twisted Fibers”为题发表在Materials Horizons上。
自然界中的很多生物材料,如DNA、肌动蛋白、胶原蛋白、角蛋白等,是由具有螺旋型的单元细胞重复组装而成。这种对手性单元进行多级组装的方式,能使材料具有极佳的力学性能和环境适应性。例如,由右手性的双螺旋球状肌动蛋白组成的纤维状肌动蛋白可以使肌肉在张力下保持刚性,在扭转作用下保持弹性。由左手性的基元螺旋纤维向右手方向扭转组装而成的超螺旋结构,可以使胶原蛋白具有可靠的抗损伤能力和韧性。如何在微米尺度设计出类似的手性结构,并将这种结构的带来的优良特性赋予到人工材料中仍存在着巨大的挑战。溶致驱动器在能源收集,智能织物和软体机器人等领域具有巨大的应用前景,它们在特定的液体刺激下能发生多种形变,从而长生驱动能力。
已经报道的溶液驱动系统仍然在一下几个方面受到限制:(1)实用性,具有实用性的驱动系统需要具有在复杂的工作环境下工作的能力,并展示出多种驱动模式和精确的能量输出,这一点很少得到解决。(2)可加工性,大多数业已开发的驱动系统其基元需要苛刻的加工工艺,更是需要繁杂的净化系统来去除杂质,且生产设备的产能极低。(3)工作效率,目前报道的大多数驱动系统,其能量转化效率都不高,这是因为没有找到对溶剂响应快,能量输出能力强的构筑单元。
刺激响应的驱动材料一直是能源领域的研究热点,一直以来,人们致力于如何以一种低廉的方式开发出实用性好、性能优异的驱动系统。目前,已报道的各种各样的驱动系统,虽然能在某种刺激下发生响应,发生一定的变形。但响应较慢、能量输出不高、灵敏度差、且工作模式也很单一,这些问题极大限制了智能驱动领域的发展。解决这些问题的方法有两个:以较低的成本制备出高性能的驱动基元克服性能不足的问题;提出一种高效合理的设计理念来梳理驱动系统的研发过程。
高超教授团队从这两个方面出发,提出了一套解决方法:(1)以价格低廉的氧化石墨烯分散液做为原材料,参照工业纺纱的原理制备连续加捻的手性氧化石墨烯纤维。在加捻的同时赋予其良好的柔韧性,并在纤维内部储存大量的应力势能。(2)借用天然生物材料的设计理念,将不同手性的纤维组装在一起,通过控制纤维输出的扭矩大小,得到了一系列高灵敏度,高能量输出效率的溶剂驱动系统,并且可以收集动能,电能和重力势能等不同能量。
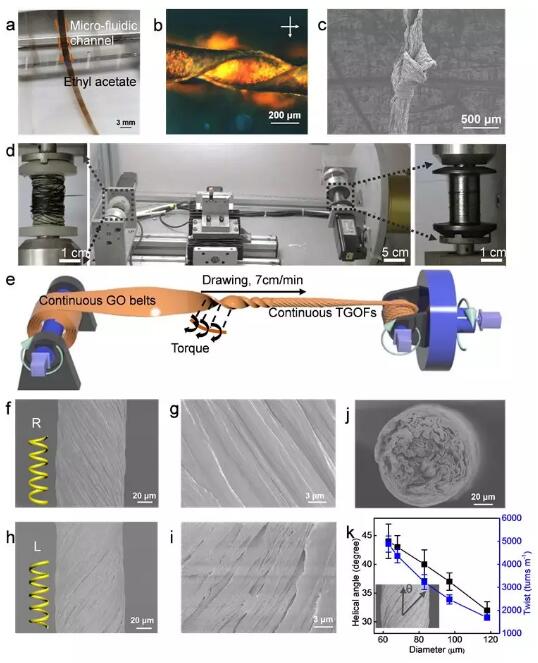
图1. 连续加捻工艺制备手性氧化石墨烯纤维的示意图
研究人员利用微流道技术,采用湿法纺膜的方式使氧化石墨烯水溶液注入凝固浴中,得到柔性极佳的氧化石墨烯膜。加捻后,可使薄膜在法向力的作用下沿着统一方向形成螺纹状织构。法向力的作用方向可以控制螺纹的走向,从而使纤维具有“左”和“右”两种手性。纤维的表面非常均匀,内部结构也很致密,呈现出极佳的力学性能。
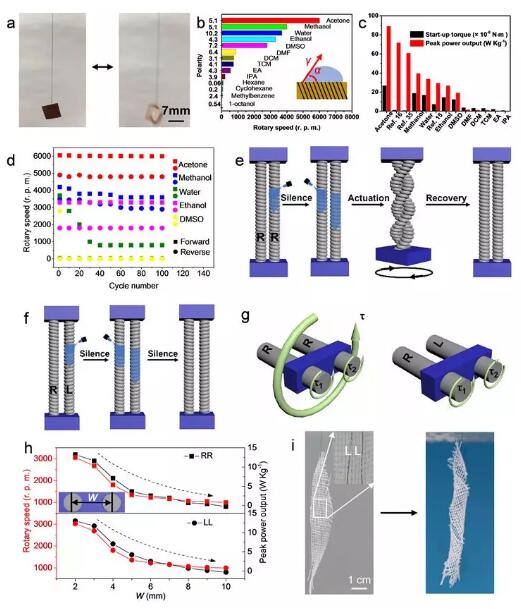
图2. 手性纤维的溶剂驱动性
研究者研究了手性氧化石墨烯纤维的溶剂驱动能力。由于氧化石墨烯与极性溶剂具有良好的亲和力,在与极性溶剂接触时内部储存的应力势能得到释放,从而发生急速的转动。这种驱动模式是可以多次循环进行的,以它为单元构筑成双基元的驱动系统。当两个基元手性相同时,在溶剂的刺激下输出同向的合扭矩,发生快速的扭转;当两个基元手性相反时,输出的扭矩大小相同,方向相反合扭矩为零,体系与溶剂接触时不发生任何转动。在同手性体系中,其能量输出大小可以通过控制两个基元的间距来控制:间距越小,能量输出越高。这就是手性控制理念的基本体现,它可以用在织物中,并在溶剂中控制织物的扭转变形。
图3. 高灵敏度的电能收集系统
进一步将三个手性纤维基元组装在一起,提出一套高灵敏度的电能收集系统。他们将一块磁铁与纤维连接在一起,并在四周放上磁感铜线圈。在溶剂的刺激下,纤维会带动磁铁发生转动,并在铜线圈内部产生电流,这就将动能成功转换成电能输出。改变纤维的手性可以使系统输出不同的动能,且具有不同的频率。通过研究纤维手性搭配和电能输出大小的关系,计算所有系统的能量输出效率,发现其效率值普遍高于50%,这比之前报道的能量转换系统要高。
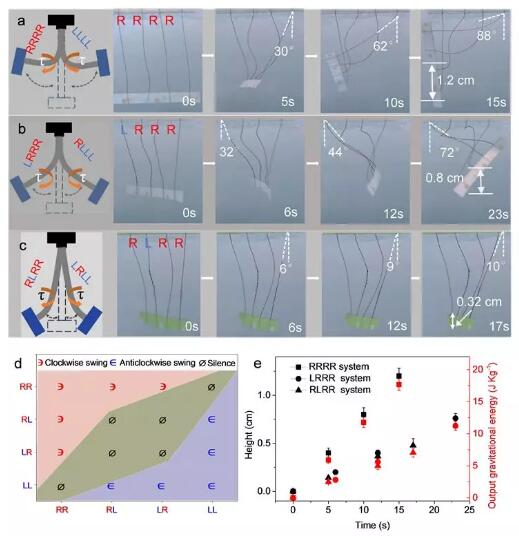
图4. 高灵敏度的操作系统和重力势能收集系统
这种能量收集系统在软体机器人的领域也具有相当的应用价值。研究人员模仿人的手掌,将四根纤维组合在一起。在溶剂的刺激下,这种四个基元的工作系统可以灵活地操作比自身重160倍的重物。重物的重力势能变化,启动速度和运转方向都可以用手性来进行精确地控制。
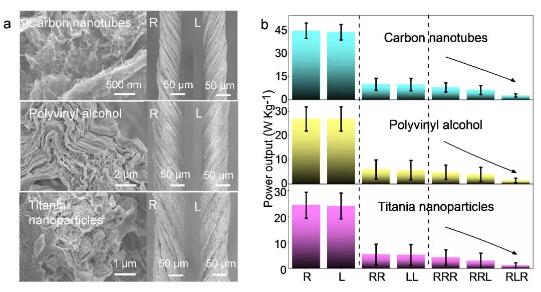
图5. 基于不同材料的手性控制系统
不仅限于二维的石墨烯材料,这种手性控制的理念还可以延伸到零维的二氧化钛纳米粒子,一维的碳纳米管和高分子材料。基于这些材料制备的加捻纤维,以其做为基元得到的驱动系统具有和上述系统相同的灵敏度,证明了该理念的普适性。
以一种合理有效的理念制备出成本低、效率高的溶剂驱动系统是一个困扰了研究人员很久的难题。高超教授课题组提供了一种手性控制原则,将DNA、肌肉蛋白和胶原蛋白等生物材料的手性结构赋予到溶剂驱动以通中来,解决了这个问题。该团队针从氧化石墨烯分散液出发,采用纺纱工艺制备出柔韧的手性氧化石墨烯纤维,这种纤维能在多种溶剂刺激下发生快速驱动。以这种纤维为单元,构筑了高灵敏度的动能、电能和重力势能的能量收集系统。进一步的,研究人员将这种理念拓展到其它维度的材料中,在未来具有非常好的应用前景。
该研究工作获得国家自然科学基金及科技部重点专项基金的资助,论文第一作者为浙江大学高分子科学与工程学系纳米高分子高超课题组的博士生方波。
 m.cnreagent.com
m.cnreagent.com